Спринт 2 — Отчёт о выполненных работах¶
Период: 05.04.2026 — 18.04.2026 Практика: преддипломная (производственная), 09.04.04 «Программная инженерия» Тема: Разработка единой среды управления физическим робототехническим стендом и симулятором в Unity для sim-to-real исследований Проект:
uav-simulatorСтудент: Горовенко Никита Максимович, группа КИ24-04-3М
Оглавление¶
- Итоги спринта
- Трасса cardboard corridor
- Физика и визуал робота KS0223
- Обучение CNN-PPO на L-коридоре
- Процедурный генератор трасс
- Эксперименты с обучением на maze
- WebUI и инфраструктура обучения
- Выполненные задачи
- Что переносится в Спринт 3
1. Итоги спринта¶
Цели спринта — перейти от baseline MLP-политики к vision-обучению на sim-to-real треке, собрать рабочую связку Unity → Python RL → ONNX → backend autopilot и подтвердить работоспособность контура на формальной оценке — выполнены.
Ключевой результат: модель cardboard-corridor-ppo-v6, обученная CNN-PPO на картонной L-трассе 60×25см (масштаб 1:1 с реальной), проходит 20 эпизодов формального eval с 100% success rate. Это первая рабочая sim-to-real модель на платформе.
Для расширения возможностей платформы дополнительно реализован процедурный генератор картонных лабиринтов (track.cardboard_maze.v1) — нужен чтобы модель училась проходить не одну фиксированную форму, а произвольные конфигурации картонных стен, которые могут встретиться в реальном эксперименте. Обучение CNN-PPO на длинных процедурных трассах в рамках этого спринта не сошлось и переносится в Спринт 3 с curriculum-learning подходом.
2. Трасса cardboard corridor¶
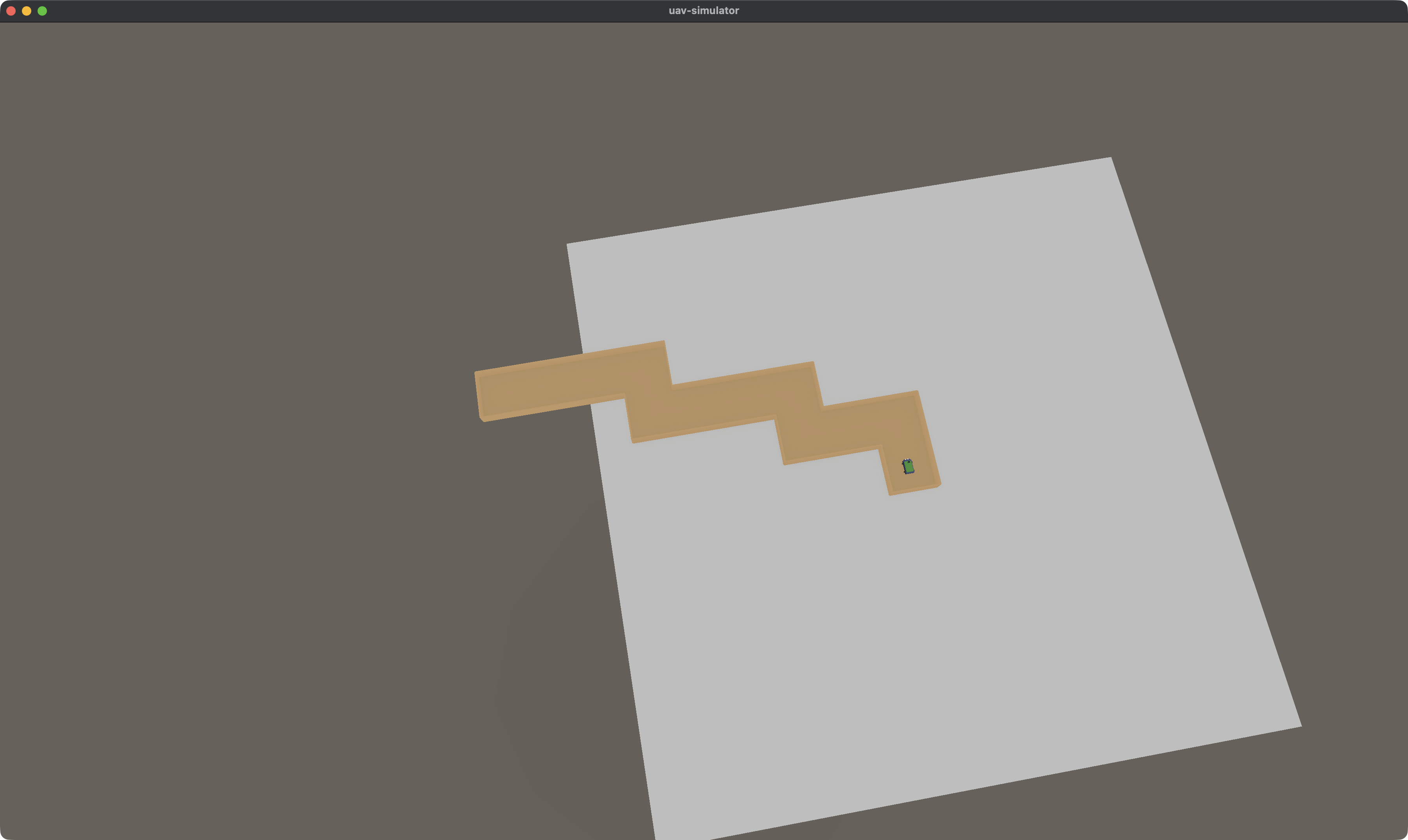
Для sim-to-real переноса нужна трасса, соответствующая реальной картонной конструкции, которую можно собрать в комнате. Реализован процедурный трек track.cardboard_corridor.v1 — L-образный коридор 60см шириной и 25см высотой стен, один поворот 90° направо. Всё в масштабе 1:1 с физической реализацией.
Вид трассы сверху в симуляторе:
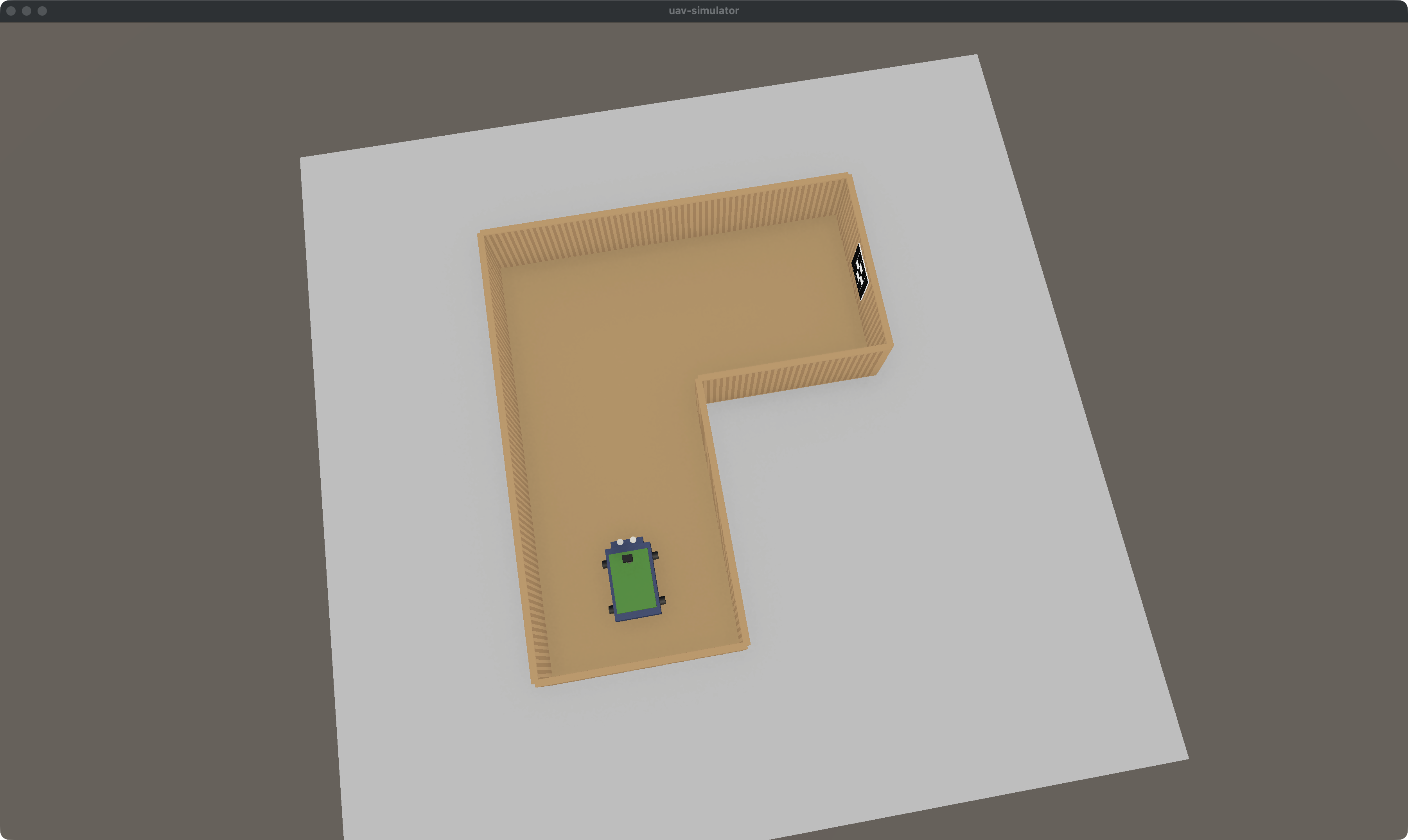
Робот (зелёный) стоит на старте в начале Segment A, впереди — прямой коридор до поворота, далее направо до финишной стены с ArUco-маркером (виден справа вверху трассы).
Вид с камеры робота на старте:
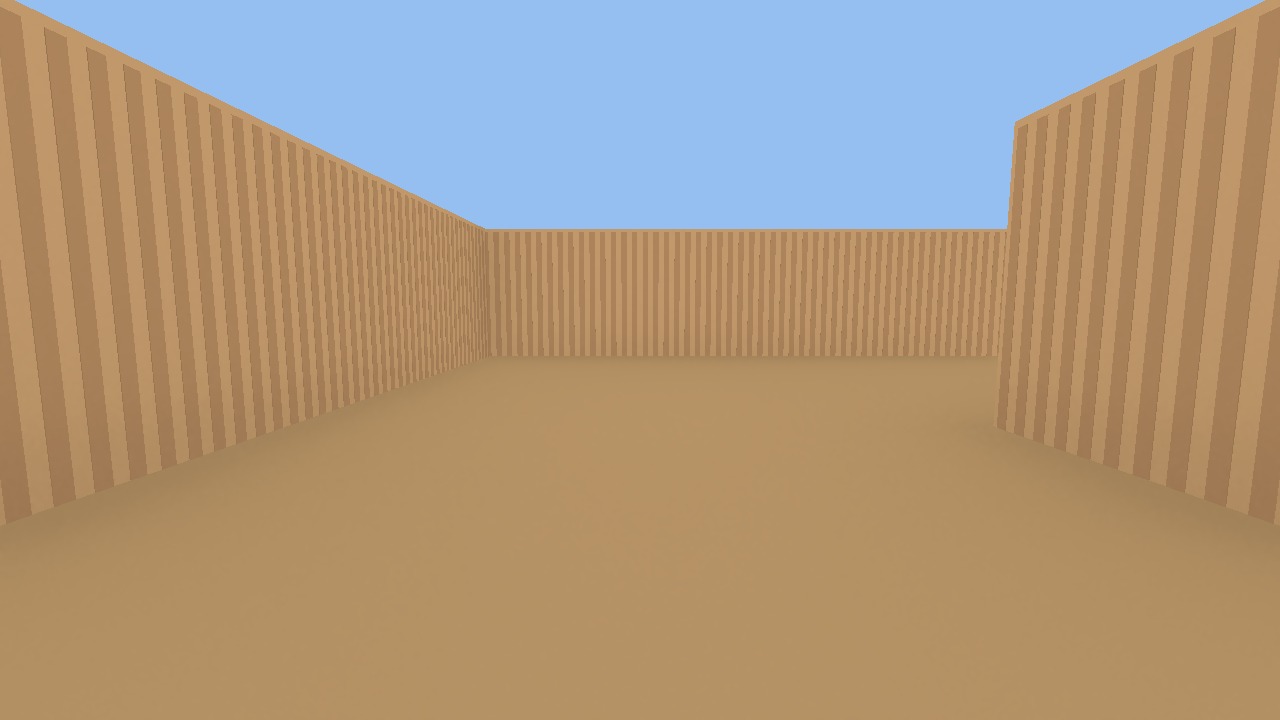
Именно эту картинку видит CNN на входе (после ресайза до 84×84). Видно стены из картона, пол в цвет ламината, впереди сегмент A до поворота.
Геометрия трека:
| Параметр | Значение |
|---|---|
| Ширина коридора | 0.60 м |
| Высота стен | 0.25 м |
| Толщина стен | 0.02 м |
| Сегмент A (до поворота) | 1.10 м |
| Сегмент B (после поворота) | 0.90 м |
| Поворот | 90° направо |
| ArUco маркер | 14×14 см на финишной стене |
Трек строится процедурно из примитивов Unity при каждом reset — 6 стен образуют замкнутую L-форму, пол только под коридором, серый окружающий пол имитирует комнату.
Стенам назначен PhysicsMaterial с высоким трением (dynamic 0.9, static 0.95) и минимальной упругостью (0.05). Это необходимо чтобы обученная модель не выработала стратегию «скольжения вдоль стены» — без трения робот использовал бы контакт со стеной как направляющую, что для реального робота на картоне означало бы поломку сенсоров.
3. Физика и визуал робота KS0223¶
Робот в симуляторе собран в масштабе 1:1 с физическим KS0223, чтобы обученная модель переносилась без гэпа по размерам и динамике.
- Размеры. Шасси 14×5×22см, с колёсами и мачтой камеры 15×7×25см. Коллайдер 15×12×25см. Визуал собран из примитивов Unity: корпус, PCB-плата, батарея, передний бампер, два ультразвуковых датчика на носу, 4 колеса-цилиндра, мачта с камерой-кубиком.
- Velocity-based движение.
FixedUpdateустанавливаетRigidbody.linearVelocityнапрямую — робот корректно взаимодействует с физическими коллайдерами стен и отталкивается при контакте. - Позиция камеры. Y=9см (реальная высота мачты), направлена вперёд (+Z) — изображение в симуляторе и на реальном роботе имеет одинаковый ракурс.
Differential drive mapping (управление дифференциальным приводом):
Вход API: throttle, steer ∈ [-1, 1]
↓
Дифф. привод: leftPWM = throttle - steer
rightPWM = throttle + steer
↓
Физика: linearVelocity = forward * (throttle * maxSpeed)
yawRate = steer * maxYawRate
Параметры физики:
| Параметр | Значение |
|---|---|
| Max speed | 2.2 м/с |
| Max yaw rate | 160°/с |
| Mass | 1.0 кг |
| Linear damping | 0.2 |
| Angular damping | 1.5 |
| BoxCollider | 0.15 × 0.12 × 0.25 |
4. Обучение CNN-PPO на L-коридоре¶
Это главный результат спринта по задаче «обучение политики для сценария A→B».
4.1. Среда¶
ABCorridorVisionEnv — Gymnasium env с Dict observation, совместимая с реальным роботом:
image:Box(0, 255, (84, 84, 3), uint8)— RGB с камеры роботаultrasonic:Box(0, 1, (1,), float32)— расстояние до стены спереди (нормировано на 5 м)
Action: Box(-1, 1, (2,), float32) — [throttle, steer].
Среда подключается к Unity runtime по HTTP, каждый step() → POST /step, reset() → POST /reset. При обучении timeScale=3.0 для ускорения сбора данных.
4.2. Reward shaping¶
Функция вознаграждения спроектирована с защитой от стратегии «облизывания стены» — оптимального по времени racing line, при котором робот использует контакт со стеной как направляющую для быстрого добегания до финиша. Такой проход неприемлем для реального робота — постоянный скрип по картону ведёт к поломке сенсоров.
Защита реализована через масштабирование goal bonus от качества вождения:
- Ехал по центру весь эпизод → goal bonus 150
- Облизывал стены → goal bonus 30
- На каждом шаге
lateral_penalty = −3 × wall_proximity²
Финальная функция вознаграждения:
| Компонент | Формула | Назначение |
|---|---|---|
| Progress | Δprogress × 20.0 |
Продвижение по маршруту |
| Waypoint bonus | +10 за каждый новый waypoint |
Прохождение ключевых точек |
| Lateral penalty | −3.0 × wall_proximity² |
Жёсткий штраф у стены |
| Speed reward | 0.1 × speed × center_bonus |
Скорость только по центру |
| Steer jerk | −0.05 × \|Δsteer\| |
Плавность руления |
| Time penalty | −0.02 за шаг |
Стимул двигаться |
| Goal bonus | 30 + 120 × center_quality |
Бонус за центровое вождение |
| ArUco bonus | +20 при детекции маркера |
Учить видеть маркер |
| OOB penalty | −30 (терминал) |
Выезд за коридор |
| Stall penalty | −10 при 30 шагах застоя |
Анти-залипание |
С такой функцией wall-riding экономически невыгоден:
- По стене:
−3 × 15 шагов = −45+goal 30= net −15 - По центру:
~0+goal 150= net +150
4.3. Результаты eval¶
Модель cardboard-corridor-ppo-v6, 250 000 шагов обучения на CPU (~7 часов). Формальный eval на 20 эпизодах с фиксированными seed:
| Метрика | Значение |
|---|---|
| Success Rate | 20/20 = 100% |
| Avg Reward | 128.45 |
| Avg Progress | ~95% |
| Avg Lateral (mean) | 0.137 м |
| Avg Lateral (max) | 0.300 м |
| Steps to goal | 13–14 |
Mean lateral 0.137 м при половине коридора 0.30 м означает что робот реально едет ближе к центру, не к стенам. Max lateral 0.300 м достигается только в повороте — для 15см робота в 60см коридоре пройти 90° поворот без касания внутренней стены физически невозможно.
Артефакт результатов: docs/report/prediploma-practice/evidence/eval_cnn_cardboard_v6_250k_20ep.json
5. Процедурный генератор трасс¶
В реальном эксперименте sim-to-real картонная трасса, собранная в комнате, не обязательно будет простой L-формы. Чтобы обученная модель обобщалась на произвольные конфигурации стен, добавлен процедурный генератор лабиринтов как отдельный плагин track.cardboard_maze.v1.
5.1. Алгоритм¶
Grid-based drunk-walk с бюджетом поворотов (MazeGenerator.cs):
- Сетка 40×40 клеток, размер клетки = ширина коридора
- Старт в центре, направление +Z
- На каждом шаге случайно: вперёд / налево / направо (если бюджет > 0)
- Если клетка впереди занята — backtrack (освобождение бюджета того поворота, который сделали)
- Стены ставятся там, где соседняя клетка не в пути
Параметры плагина описаны через JSON Schema в parametersSchemaJson, что позволяет WebUI автоматически собирать форму настроек:
maze.seed(0–999999) — воспроизводимостьmaze.length_cells(3–20) — длина пути в клеткахmaze.corridor_width_m(0.40–1.00) — ширина коридораmaze.left_turns,maze.right_turns(0–10) — бюджет поворотовmaze.wall_height_m(0.15–0.40) — высота стен
5.2. Примеры сгенерированных трасс¶
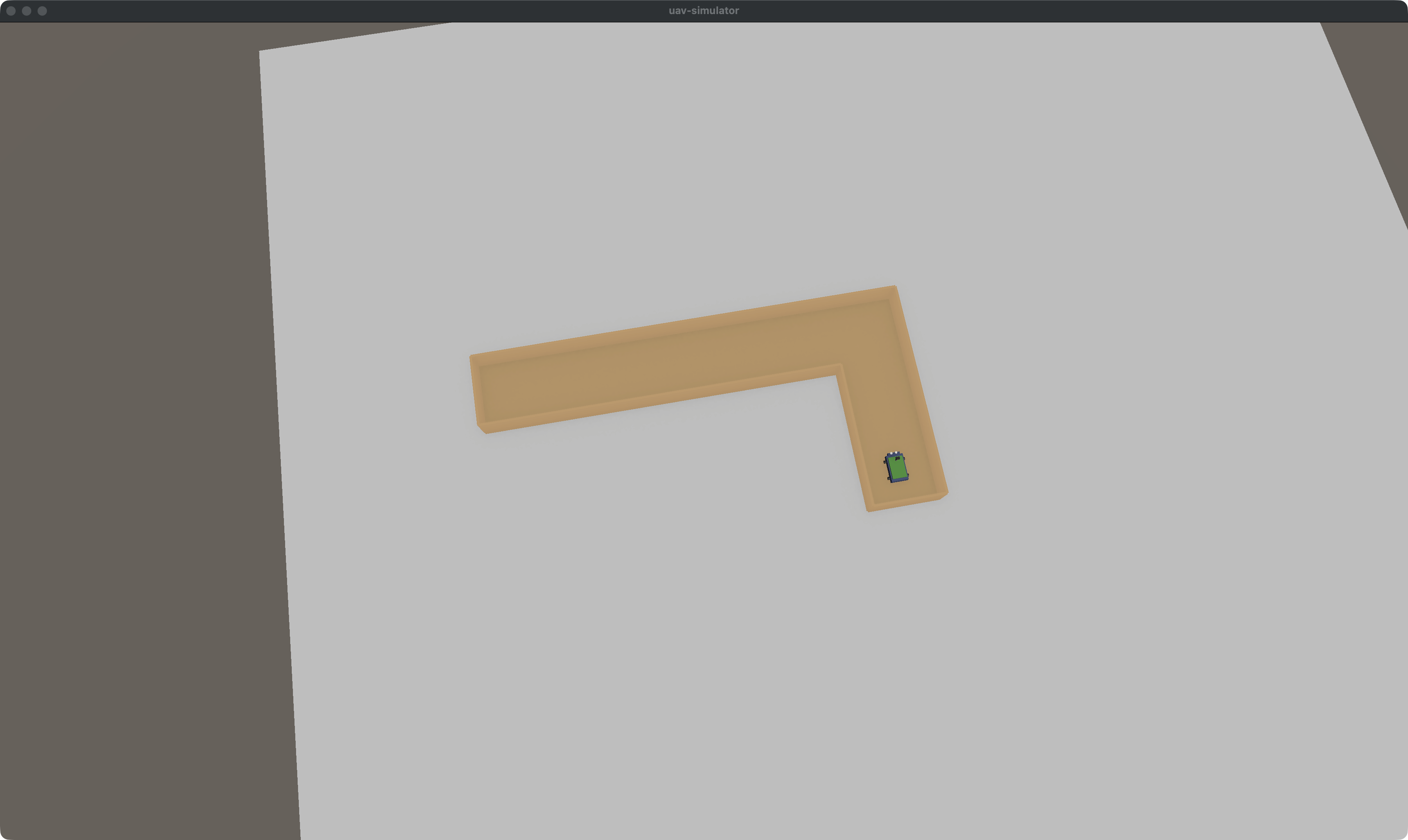
seed=42, 8 клеток, ширина 60см — простая L-форма с одним поворотом:
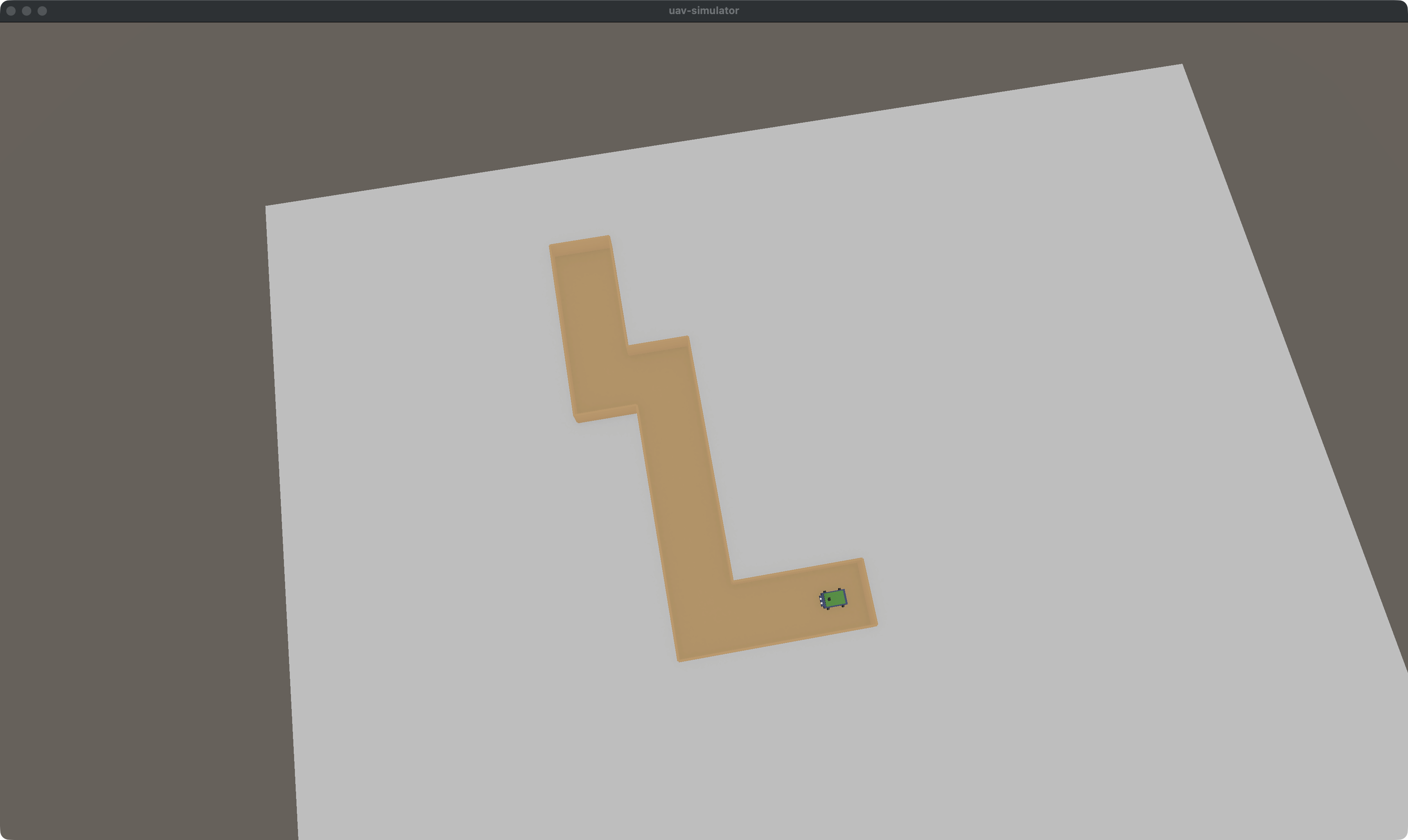
seed=7, 10 клеток, ширина 60см — зигзаг с тремя поворотами, более сложный путь:
seed=123, 12 клеток, ширина 80см, 3L/2R — длинный зигзаг в широком коридоре:
Одинаковый seed всегда даёт одинаковый maze, что позволяет точно воспроизводить результаты экспериментов.
5.3. Синхронизация Python ↔ Unity¶
Python и C# используют разные генераторы псевдослучайных чисел (Mersenne Twister vs Knuth subtractive), и один seed даёт разные последовательности. Чтобы геометрия в Python-среде обучения и в Unity всегда совпадала, используется следующая схема: Python генерирует путь, Unity строит геометрию по готовому пути. Python кодирует путь как строку "x0,z0;x1,z1;..." и передаёт в trackParams["maze.path_encoded"]. Unity парсит строку и строит стены по этим координатам, не обращаясь к своему PRNG.
6. Эксперименты с обучением на maze¶
Для обучения политики на процедурных трассах проведены три серии экспериментов.
v2 — рандомизация каждый эпизод:
- 40k шагов, reward улучшился с −119 до −42
- До положительного reward не дотянул
- Unity нестабильно работал при регенерации геометрии каждые 1–2 секунды;
--maze-regen-every 5(один maze живёт 5 эпизодов) помогло со стабильностью, но не с обучением
v3 — фиксированный maze (seed=42):
- 15k шагов, reward застрял на −290..−300
- Путь длиннее чем L-коридор (8 клеток ≈ 4 метра против 1.5 м), случайная политика никогда не доходит до финиша за отведённые 400 шагов
- Модель не может выйти из плато без curriculum
v4-v5 — transfer learning от v6:
- Попытка использовать v6 (100% SR на L-коридоре) как стартовую политику и дообучить на maze
- v4 с обычным lr=3e-4: catastrophic forgetting, reward скатился с −48 до −162
- v5 с lr=3e-5 и clip_range=0.1: деградация более плавная, но всё равно до −305
Вывод. Обучение CNN-PPO на длинных процедурных трассах с нуля или прямым transfer не сходится в рамках выделенного времени. Для завершения задачи требуется:
- Curriculum learning — начинать с коротких 3–4-клеточных maze и поэтапно увеличивать длину, чтобы модель получала положительный сигнал и постепенно масштабировалась
- Доработка reward shaping для длинных путей — при 400 шагах штрафы доминируют над любым прогрессом
- Возможно, pre-training на промежуточных задачах перед переходом на полноразмерный maze
Эти задачи переносятся в Спринт 3. Для текущей демонстрации sim-to-real используется модель v6 на фиксированном L-коридоре.
7. WebUI и инфраструктура обучения¶
Параллельно с основной задачей обучения в WebUI и CLI добавлен функционал для более удобной работы с экспериментами.
7.1. AutopilotPanel на вкладке Control¶
Блок AutopilotPanel на главной вкладке Control объединяет выбор модели, bind, start/stop и статус работы автопилота в одном месте — запуск обученной модели не требует переключения между вкладками.
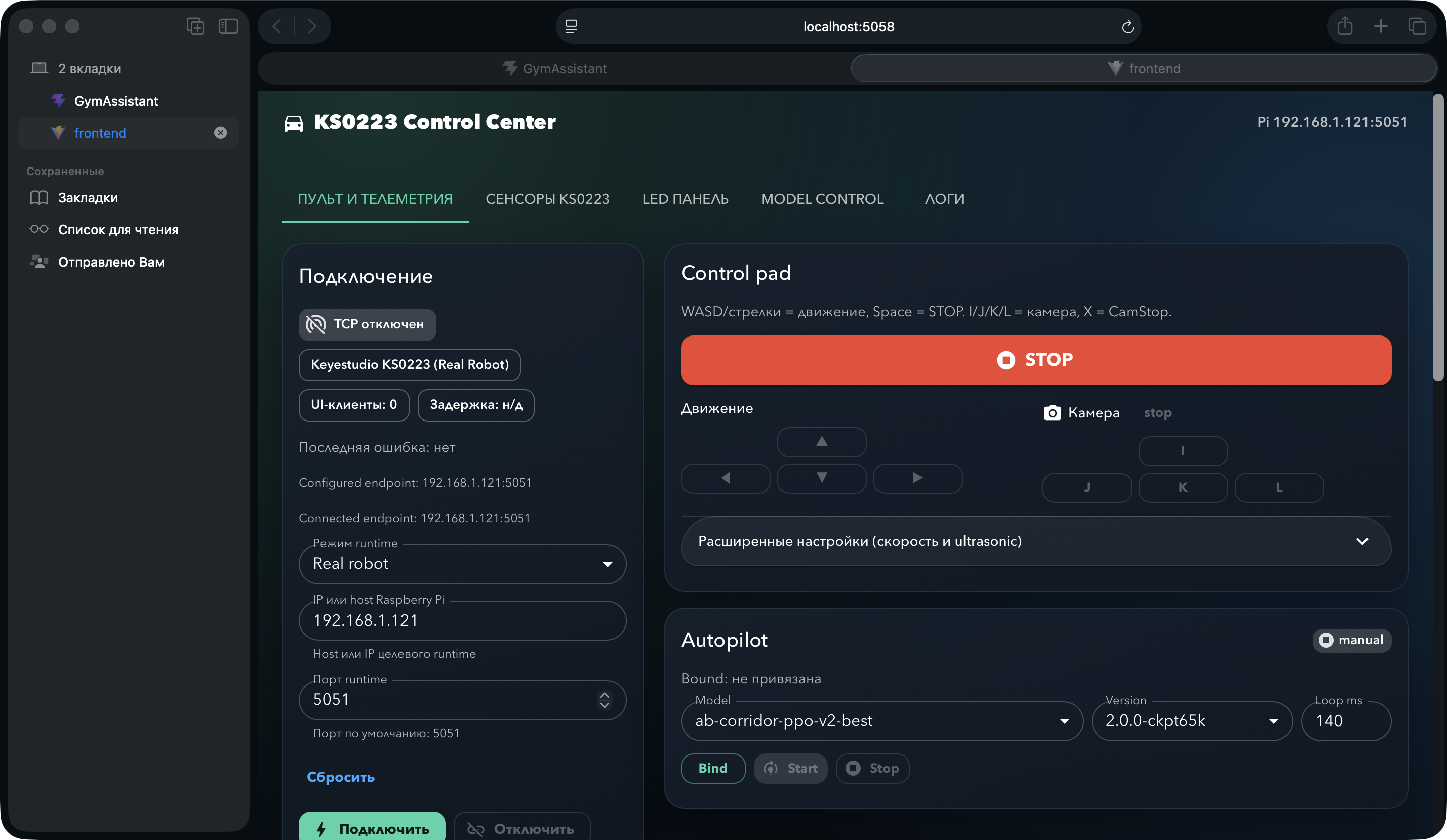
Слева — ConnectionCard (runtime, IP, port). В центре — Control Pad для ручного управления. Справа внизу — AutopilotPanel: модель, версия, loop interval и кнопки управления автопилотом.
7.2. Переключатели коллизий и видимости¶
В диалоге Unity-настроек два переключателя agents.collisions_enabled и agents.see_each_other. Нужны для мульти-агентных сценариев, где должна быть возможность запускать несколько «призраков» одной модели одновременно без физического взаимодействия.
7.3. Режим камеры top-down¶
Камера top_down в селекторе — автоматически рассчитывает bounds активной трассы и показывает её сверху с лёгким изометрическим наклоном. Используется для визуализации обучения и записи демонстрационных материалов.
7.4. Диалог настройки параметров трека¶
Плагины объявляют parametersSchemaJson. Когда пользователь выбирает трек с непустой схемой, в WebUI появляется кнопка «⚙ Settings» — попап со слайдерами и полями, автоматически собранный из схемы. Для maze — это seed, длина, количество поворотов, ширина. Нужно чтобы можно было быстро сгенерировать трассу с нужными параметрами без правки YAML.
7.5. Runtime discovery¶
Кнопка «Найти рантаймы» сканирует порты 8000–8007 и показывает живые Unity-инстансы. Нужно для удобной работы в multi-runtime режиме (rusim server up --count N), когда параллельно запущено несколько симуляторов для ускорения сбора данных.
7.6. Поддержка GPU и векторизованного обучения¶
В обучающем скрипте добавлены флаги:
--device cuda/mps/cpu/auto— выбор устройства PyTorch для ускорения обучения на GPU--num-envs N— N параллельных Gymnasium-envs черезSubprocVecEnvrusim server up --count N— запуск N Unity runtime на последовательных портах
Это даёт ~3.5–4× ускорение обучения на 4-ядерном CPU и возможность использовать GPU на стационарной машине (RTX 5080).
7.7. Детектор ArUco-маркера¶
Модуль python/sim_client/aruco_detector.py на OpenCV детектирует ArUco-маркеры в кадрах камеры. Используется одинаковый код как в симуляторе, так и на реальном роботе — на симуляторной стороне даёт сигнал параллельно с геометрическим goal-detection, на реальном роботе станет основным источником информации о прибытии в точку назначения (там нет координат в мировой системе).
8. Выполненные задачи¶
| # | Задача | Результат |
|---|---|---|
| 1 | Gymnasium-среда CNN vision (image + ultrasonic) | Реализована ABCorridorVisionEnv |
| 2 | Reward shaping с защитой от wall-riding | Center quality + жёсткий lateral penalty |
| 3 | Трек track.cardboard_corridor.v1 (L, 60см, 1:1) |
Процедурный, с физикой и ArUco |
| 4 | Робот KS0223 в правильных размерах (15×25см) | Collider + visual + velocity-based |
| 5 | Формальная KPI eval 20 эпизодов | 100% SR (20/20) |
| 6 | Процедурный track.cardboard_maze.v1 |
Grid-based с JSON Schema параметров |
| 7 | Детектор ArUco (sim + real unified) | OpenCV-модуль с pinhole distance |
| 8 | Vision ONNX backend autopilot | Image + ultrasonic входы |
| 9 | Model catalog (name→versions, bindings) | CLI + WebUI |
| 10 | AutopilotPanel в Control tab | Модель/bind/start/stop на главной |
| 11 | Collision/visibility toggles в WebUI | Управление мульти-агентным сценарием |
| 12 | Top-down camera + TrackOverviewCamera | Авто-фреймирование любой трассы |
| 13 | Runtime discovery в WebUI | Сканирование портов 8000–8007 |
| 14 | TrackParamsDialog (schema-driven UI) | Авто-генерация формы из JSON Schema |
| 15 | GPU training (--device cuda/mps/cpu) |
PyTorch device selection |
| 16 | Vectorized training (--num-envs, --count) |
SubprocVecEnv + multi-runtime |
| 17 | Camera capture fix в standalone build | MSAA + targetTexture |
| 18 | SetDirectDrive() (continuous PWM control) |
Гладкое управление автопилотом |
| 19 | vehicle.ks0223.v1 в plugin catalog |
Плагин робота с правильными параметрами |
9. Что переносится в Спринт 3¶
Задача обучения политики на процедурных maze-трассах требует дополнительного инженерного подхода (curriculum learning + доработка reward) и переносится. Sim-to-real развёртывание на физический робот также требует отдельного этапа — замеров калибровки, скрипта deploy и безопасного инференса.
План Спринта 3:
- Curriculum learning для обучения на maze (короткий → средний → длинный)
- Доработка reward shaping для длинных трасс
- Калибровка физики sim ↔ real (замеры реального KS0223)
- Перенос модели на реальный робот (ONNX inference + mapping continuous → discrete commands)
- Domain randomization (случайные цвета стен, освещение, шум камеры)
- Sim-to-real gap analysis
- Safety wrapper (ограничение скорости, аварийный стоп по ультразвуку)
- Тесты на реальном картонном треке в комнате